BLOG
Understanding Bearing Load Ratings: Dynamic vs. Static
If you’ve ever compared bearing catalogs, you’ve probably noticed that every product comes with two key numbers: dynamic load rating and static load rating. They look similar, sometimes even close in value, which makes them easy to mix up.
In reality, they describe two completely different limits.
One is about how a bearing wears out over time. The other is about whether it gets damaged before it even has a chance to run.
Dynamic load rating is not “strength”
The dynamic load rating (C) is often misunderstood as a maximum load. It isn’t.
What it actually reflects is how a bearing behaves under repeated stress while rotating. Over time, the contact between rolling elements and raceways creates microscopic fatigue. Eventually, this leads to material failure.
To standardize this, the industry uses a reference point: a load under which a bearing can complete one million revolutions with a high survival rate. From there, engineers estimate bearing life (L10) depending on how heavy the actual load is.
What matters in practice is not just the value of C, but how it compares to the real working load. The relationship is highly sensitive—once the load increases, the expected life drops much faster than most people expect.
This is why in rotating equipment—gearboxes, drive shafts, electric motors—the dynamic load rating tends to dominate the selection process.
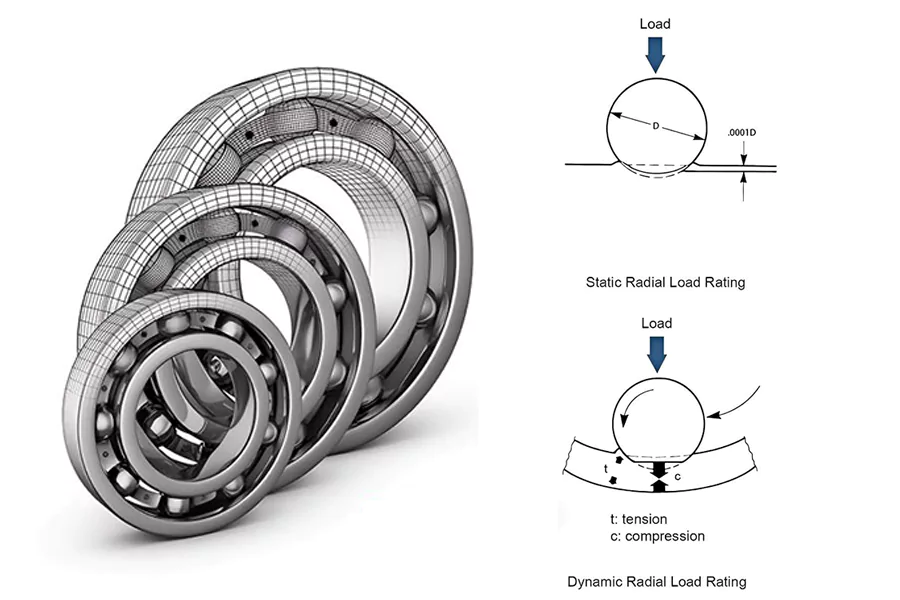
Static load rating shows up when things are not moving
The static load rating (C0) usually becomes important in situations that are easy to overlook.
Think about a machine that is sitting still but fully loaded. Or equipment that gets hit by shock loads during operation or transport. In these cases, the bearing is not failing due to fatigue—it’s being pressed too hard at specific contact points.
There is a commonly used threshold: when permanent deformation at the contact reaches roughly 0.0001 of the rolling element diameter, the limit is considered exceeded.
That number is small, but the effect is not.
Once small indentations form, they tend to stay there. Later, when the bearing rotates, those tiny imperfections show up as vibration, noise, or uneven running. It doesn’t always cause immediate failure, but it often shows up as “something feels off” in the system.
This is essentially what people refer to as brinelling.
A typical mistake: looking at only one number
In real projects, the issue is rarely misunderstanding definitions. It’s usually about what gets ignored.
A common scenario looks like this:
A bearing is selected based on dynamic load capacity, and the calculated life looks fine. Everything checks out on paper.
But the same bearing is installed in a system where it carries heavy load while stationary, or sees occasional impact. After some time, noise appears—even though the calculated life hasn’t been reached.
What happened is not a fatigue failure. It’s surface damage caused by static loading conditions that were never considered.
The opposite also happens. A bearing may have a very high static rating, but if the dynamic side is insufficient, it simply won’t last under continuous operation.
Real-world conditions are rarely clean
In theory, it’s easy to separate “rotating” and “static” cases. In practice, most applications fall somewhere in between.
- Equipment that starts and stops frequently
- Systems exposed to vibration even when idle
- Components that see both steady load and occasional shock
All of these introduce mixed conditions, where both dynamic load rating and static load rating matter at the same time.
That’s why relying on a single parameter usually leads to problems later.
What engineers actually check
Instead of treating load ratings as isolated values, a more practical approach is to look at how the bearing is used over time.
For rotating conditions, the key is to estimate the equivalent load (P) as accurately as possible. Small errors here can lead to large deviations in predicted life.
For non-rotating or shock conditions, attention shifts to margin. If the applied load is too close to the static rating, even occasional overload can leave permanent marks.
This is where the idea of a static safety factor comes in. It’s not a fixed number—it depends heavily on how severe the working environment is.
Why this distinction matters more than it seems
Many bearing issues don’t show up immediately. They appear later as noise, vibration, or reduced smoothness, even though the bearing hasn’t technically “failed.”
In many of those cases, the root cause is not fatigue—it’s early-stage surface damage.
Understanding the difference between dynamic load rating and static load rating helps prevent that kind of mismatch. It shifts the focus away from simply meeting catalog values, and toward matching the bearing to how it will actually be used.
Conclusion
Dynamic and static load ratings are often presented together, but they solve different problems.
One determines how long a bearing can operate under repeated motion. The other determines whether it can withstand load without permanent damage—especially when motion is limited or absent.
Ignoring either one usually doesn’t cause immediate failure, but it almost always shows up later.
For buyers and engineers working with real applications, this is where experience matters as much as data.
That is also where JENA can support more effectively. Instead of treating load ratings as isolated specifications, JENA focuses on how those values translate into real operating conditions—helping customers choose bearings that not only meet requirements on paper, but also perform reliably over time.
Optimize Your Supply Chain
Work with a Trusted Bearing Manufacturer Today!
Leave us a message. We will contact within 12 hours.